Привет. Я несколько лет занимался в рамках хобби "изобретением" автопилота, решил поделиться.
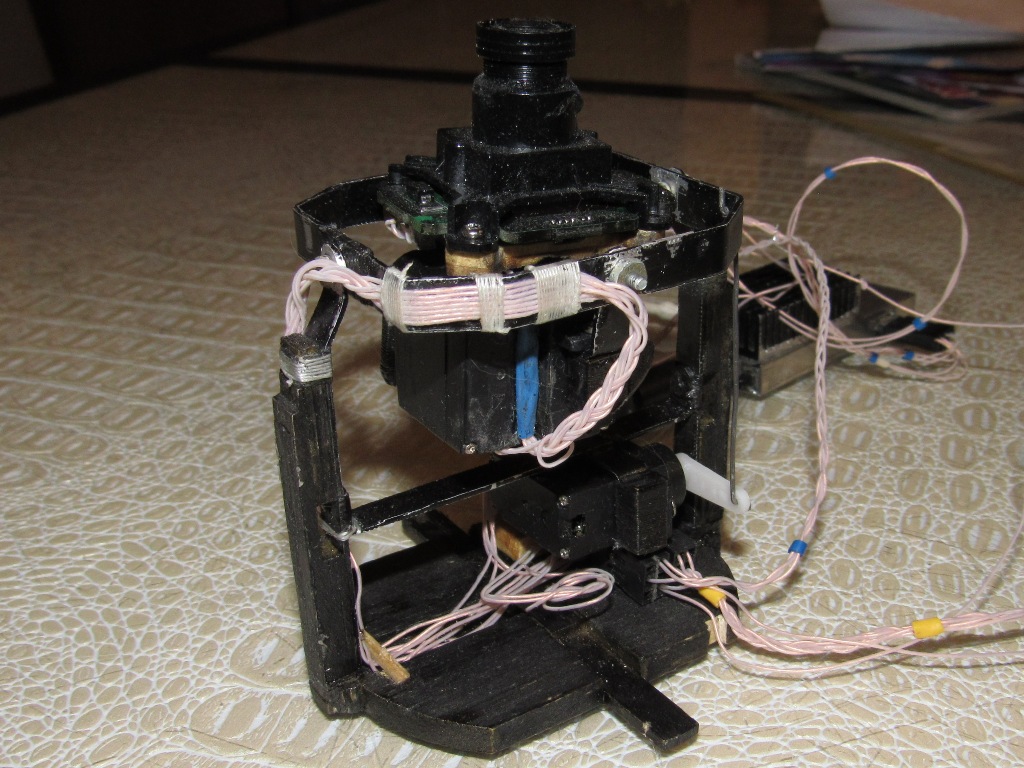
Вот так выглядит сама несущая плата с датчиками и контроллером:
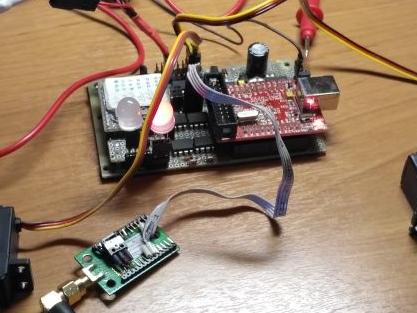
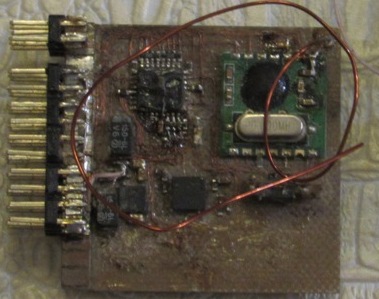
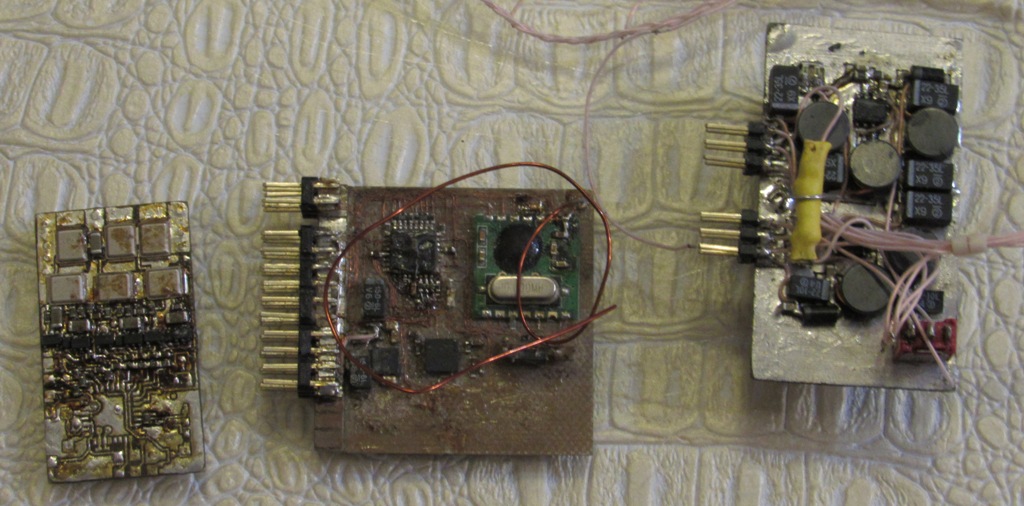
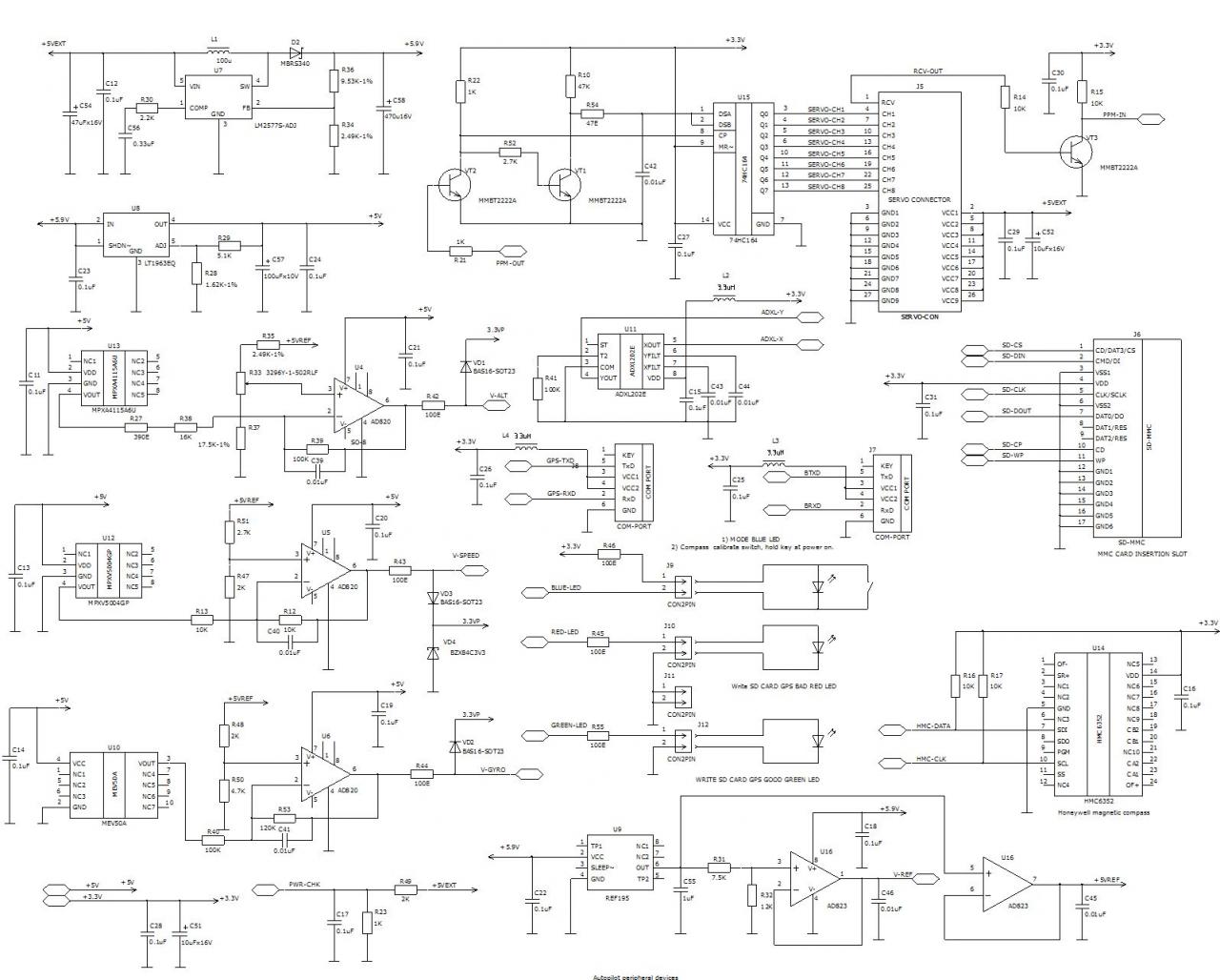
Автопилот сделан на базе отладочной платы. Схема состоит из отладочной платы и периферии:
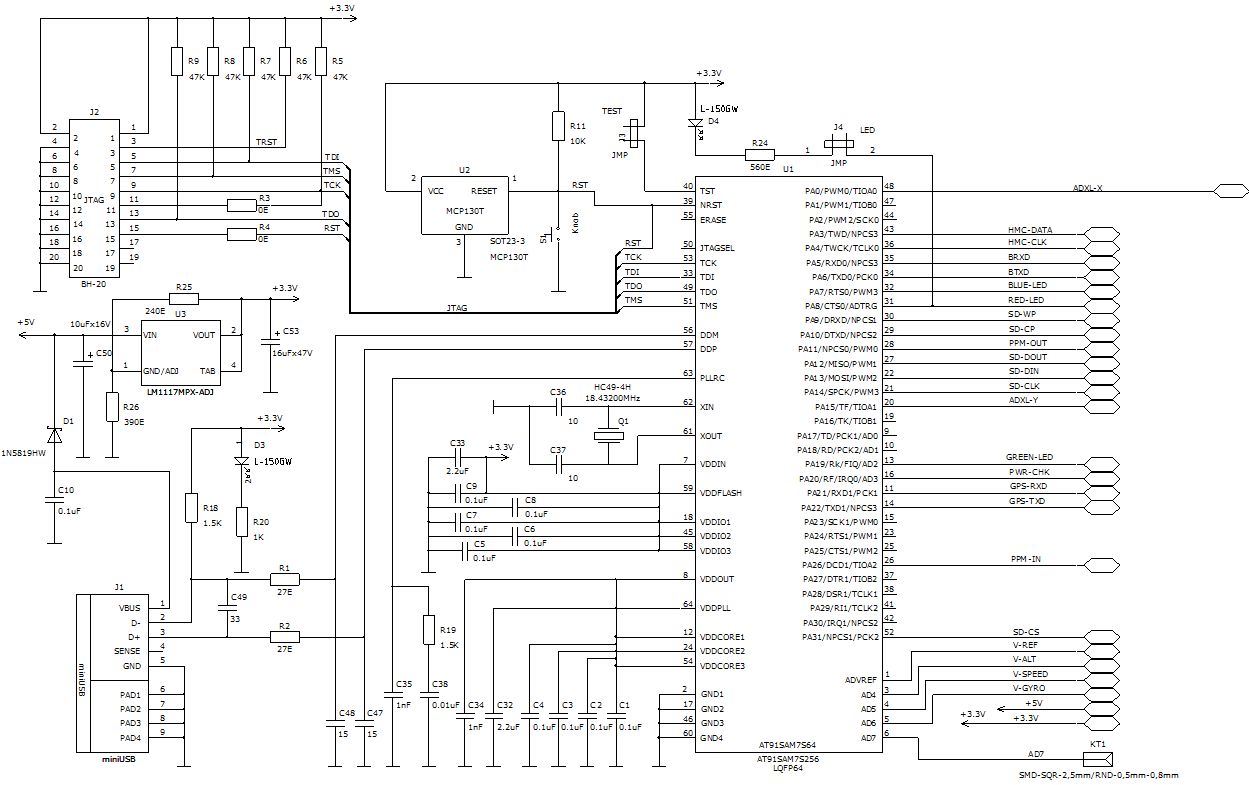
Проект с исходниками софта для контроллера можно найти тут. Софт обеспечивает работу датчиков
используя 8 обработчиков прерываний, таймеры, TWI(I2C), SPI, UART, RTTC, PWMC. Маршрут для GPS
записыватеся на SD-карту, так же полетные пишутся раз в секунду, поддерживается FAT12 или FAT32.
данные пишутся на SD карту, на которую так же пишутся полетные данные раз в секунду.
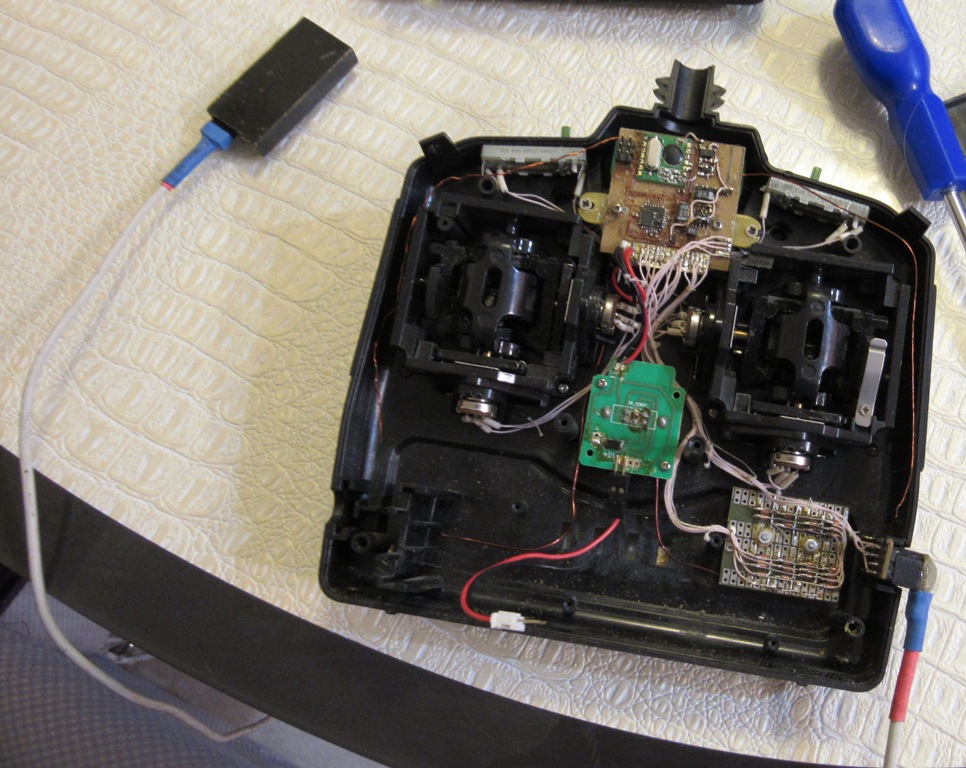
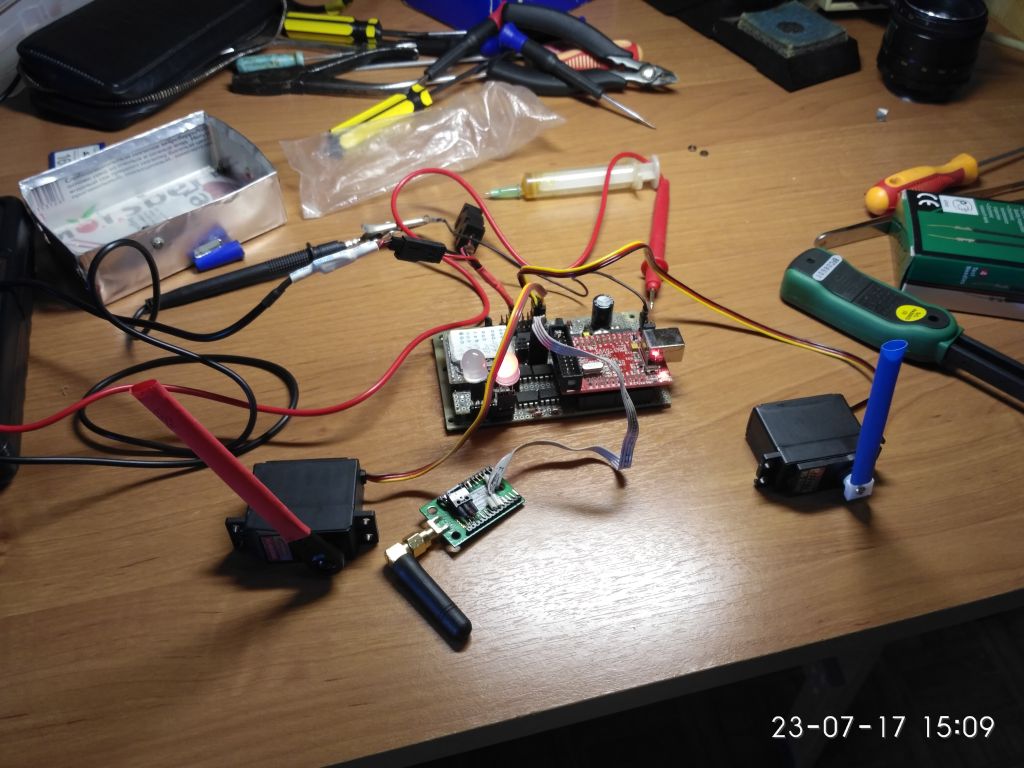
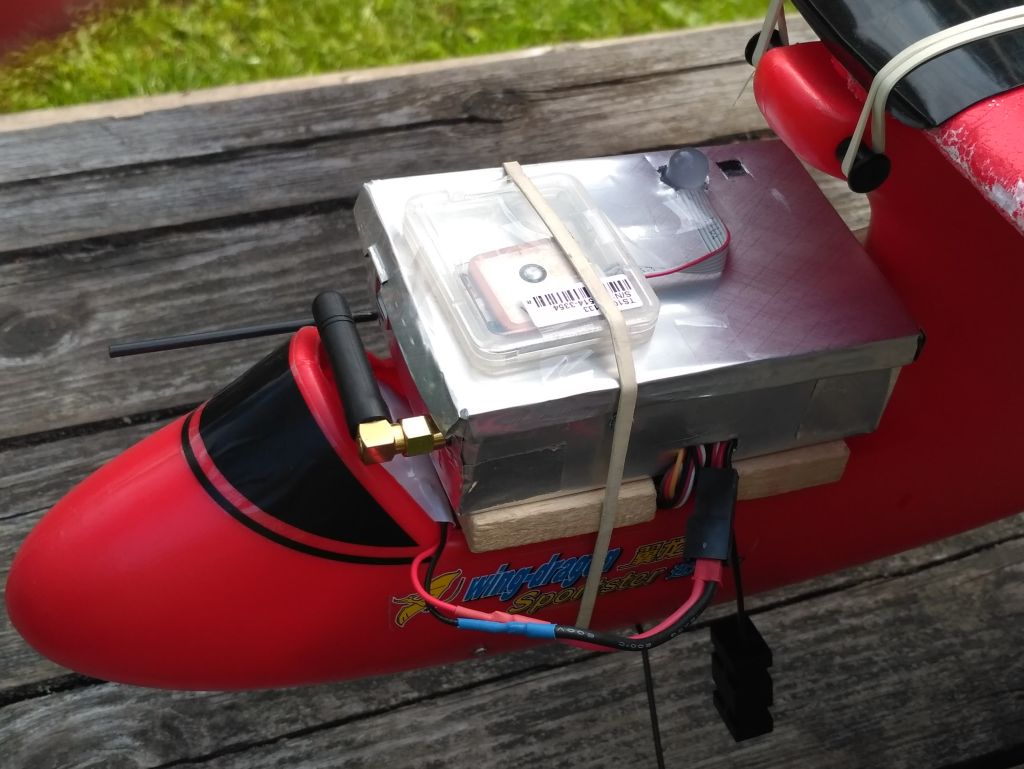
Одна из испытуемых моделей представлена на рисунке ниже.

Это Wing Dragon Sportster, размах 1.18М, взлетный вес по паспорту 650г, реально измеренный 750г,
с автопилом 840г. (явный конечно перегруз) Более подробно с проектом можно ознакомиться в моем блоге.
В статье выдвинута концепция построения автопилота для радиоуправляемого беспилотного самолета
на базе дешевого контроллера и современных инерциальных датчиков положения. Концепция проверена
на модели виртуальной с использованием симулятора X-Plane 6 и на реальной модели с толкающим винтом
и электрическим мотором. Предложен вариант алгоритма полета по маршруту с использованием GPS.
Проведены испытания, построены графики и обсуждены полученные полетные данные и видеоматериалы
испытаний. Приведена программа расчета центровки самолета с использованием программируемого
калькулятора под Android и приведен пример ее использования. Доступны все исходники от моделирования
до проекта печатной платы.
Прикрепленные изображения
Сообщение отредактировал Maksimuzz: 27 Jan 2018 - 22:49