Я так понял, что гироскоп изначально настроен на одну из осей. Но можно его направить по той оси, которая нужна (если говорить уж слишком по-простому, то перевернуть).
1 - "Гироскоп" - не зря в кавычках. Те "гироскопы" что применяют в основном, таковыми в прямом смысле слова - гироскопами, не являются. Это (в подавляющем большинстве) датчики УГЛОВЫХ УСКОРЕНИЙ. Они (в отличии от настоящего гироскопа) не "помнят" физически своего положения в пространстве. Простейший пьезо - гироскоп устроен приблизительно так: полоска пьезо элемента зажата за один конец, а другим висит в воздухе. При перемещении (вращении) свободный конец под действием инерции немного изгибается. Это вызывает возникновение в пьезо-электрике пропорционального изгибу электрического потенциала. Который регистрируется и обрабатывается микро-контроллером. И именно контроллер пытается удерживать направление (наклон ...) запоминая и сравнивая сигнал датчика. Такой "гироскоп", возможно, может работать вдоль любой из 3-х осей вращения. Смотря как его расположить.
2 - Гироскоп вертолёта: на его вход поступает сигнал PPM с приёмника по каналу управления рулём направления.
В ПЕРЕДАТЧИКЕ сигнал направления микшируется с каналом шаг/газ, тем самым настраивается базовая компенсация разницы вращающего момента главного ротора на разных оборотах/шагах. В частности: в Spektrum DX7 имеются ДВА значения микшера - для максимального и минимального значения газа. Среднее значение отстраивается механически - начальной установкой шага хвостового винта.
Принятый гироскопом сигнал обрабатывается/модифицируется таким образом, что бы сохранить неподвижность хвоста при среднем значении PPM, и иметь вращение - пропорциональное изменению входного сигнала.
Это справедливо для режима "normal".
В режиме "AVCS",как правило, предварительное микширование в ПЕРЕДАТЧИКЕ должно быть отключенно - всем полностью рулит сам "гироскоп".
Разница режимов:
"normal" - только пытаемся удерживать хвост от движения.
"AVCS" - пытаемся удерживать заданное(запомненное) направление - это как у настоящего гироскопа.
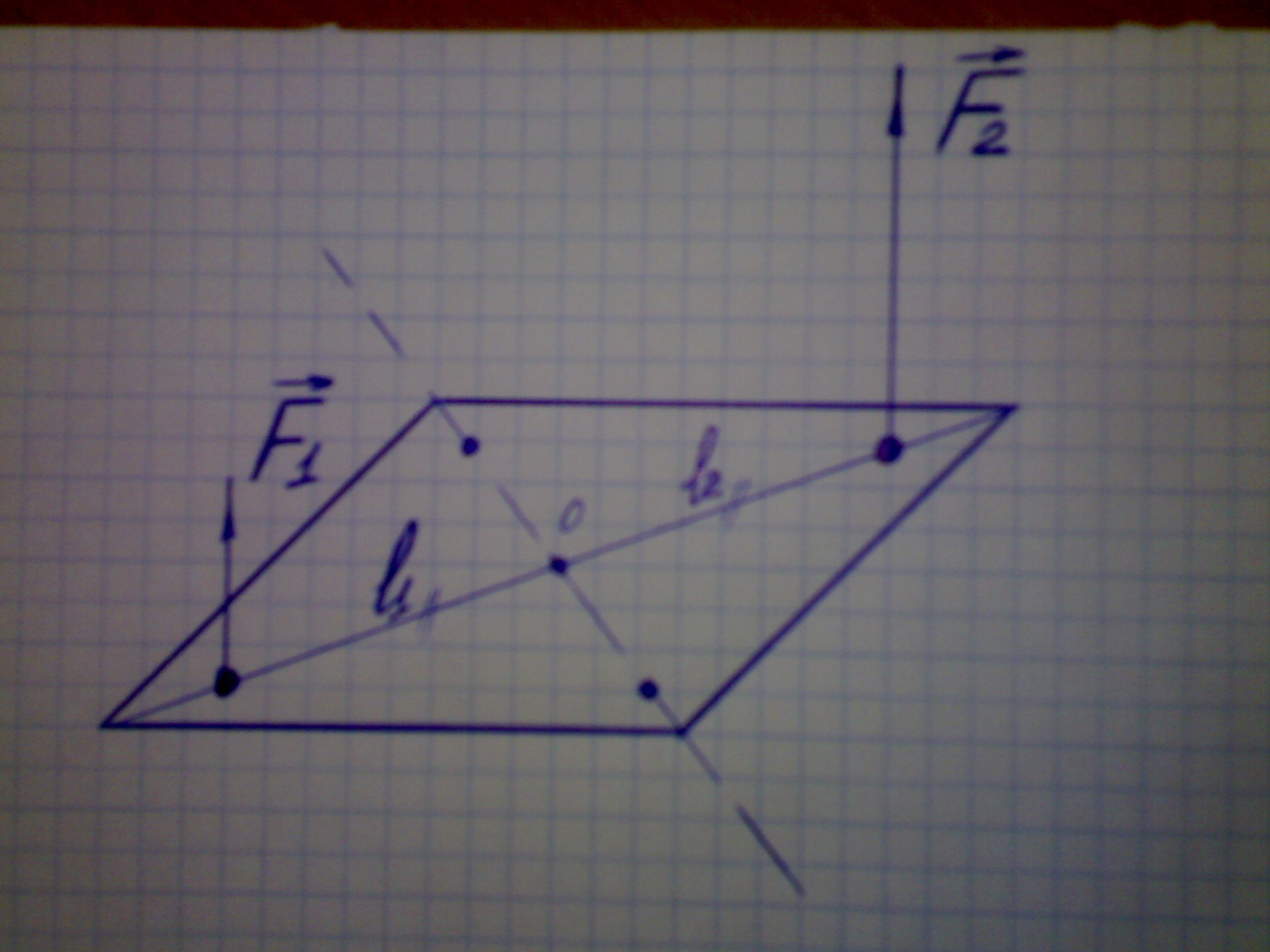
В данной (теоретической
 ) схеме летательного аппарата по каждой из 2-х осей в плоскости имеются два исполнительных устройства.
) схеме летательного аппарата по каждой из 2-х осей в плоскости имеются два исполнительных устройства.Соответственно возможны ДВА варианта управления (как минимум).
1 - на одно из ус-тв. (можно по диагонали) подаётся прямой (с приёмника) сигнал, на второе - через "гироскоп". Который и будет пытаться корректировать положение по этой оси.
2 - на одно - через гироскоп подаём "прямой" сигнал, на второе - "инвертированный".
Под словом "инвертированный" - понимаем сигнал противоположной длительности.
Которая вычесляется :Сигнал приёмника - ( Сигнал из гироскопа - Сигнал приёмника).
Недостаток первого варианта: действия гироскопа по изменению наклона приведут к изменению высоты.