1-...Про контроллер, то же мысли были, есть АПМ2.6 комплектом, но не хочется зависнуть в дебрях настроек...
2- ...Хорошая мысль, но дифферент , я бы оставил...
3-...По приводу, к сожалению с БК регуляторы с реверсом , я не работал ...Так что для начала, коллекторники в капсулах, это наверное самое простое.
1 - ArduRover - очень простой и интуитивно понятный.
Для начала в дебри автоматического управления можно не лезть.
АПМ использовать только для раздачи РРМ сигнала по каналам, сбора информации от датчиков и формирование из нее потока телеметрии.
Ну и еще не надо забывать, что бонусом к АПМ достается Mission Planner, готовый инструмент для наладки и контроля бортового оборудования.
2 - на вышеприведенной лодке поначалу было управление по крену.
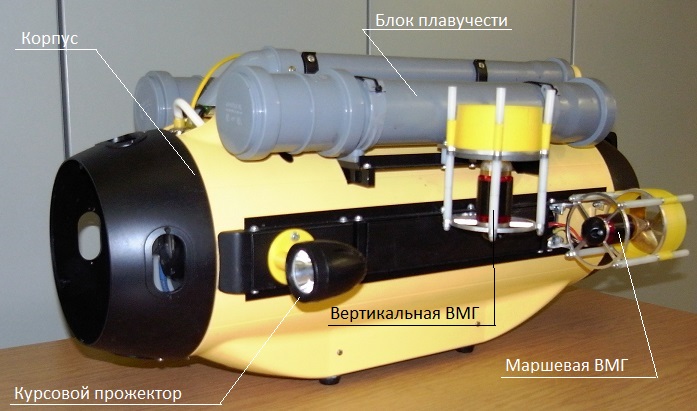
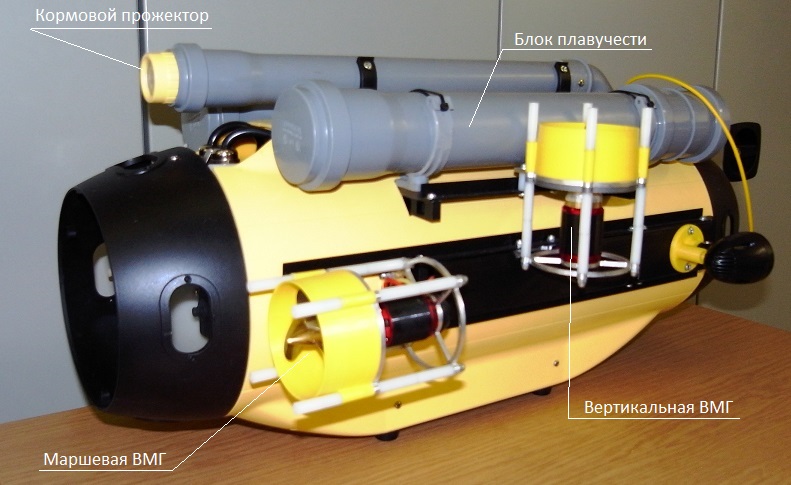
Опасались, что вертикальные ВМГ будут создавать кренящий момент из-за разнотяга от неполной синхронизации.
Но значительный разнос по вертикали ЦТ и центра величины(точки приложения гидростатической силы) позволил отказаться от этого.
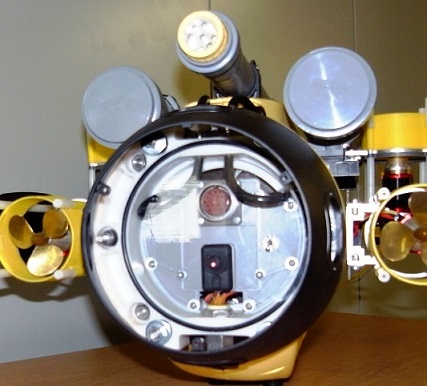
У нас основная масса, АКБ, занимает почти всю нижнюю часть гермокорпуса и еще под ним висит штатный балластный груз.
За счет АКБ добились некоторого превышения веса над водоизмещением исходного корпуса.
Этот перегруз компенсировали дополнительными блоками плавучести, которые разместили сверху. Лодка имеет минимальную положительную плавучесть.
Т.е. получился увесистый маятник на достаточно длинном "подвесе".
Окончательная регулировка ЦТ в продольном направлении, и решение проблемы дифферента, обеспечивается перемещением штатного балластного груза.
Использовали возможность исходной модели. (См. ее инструкцию)
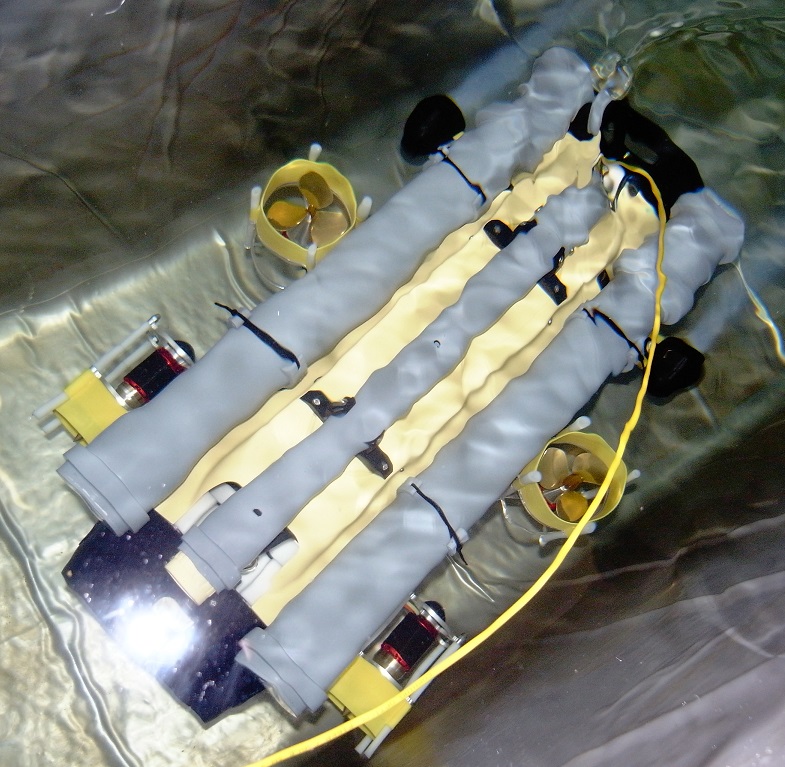
При таком решении лодку приходится постоянно "вдавливать" в глубину. Это вызывает доп.постоянный расход энергии, но небольшой.
Зато всегда есть возможность всплытия, даже при дефиците или отсутствии энергии.
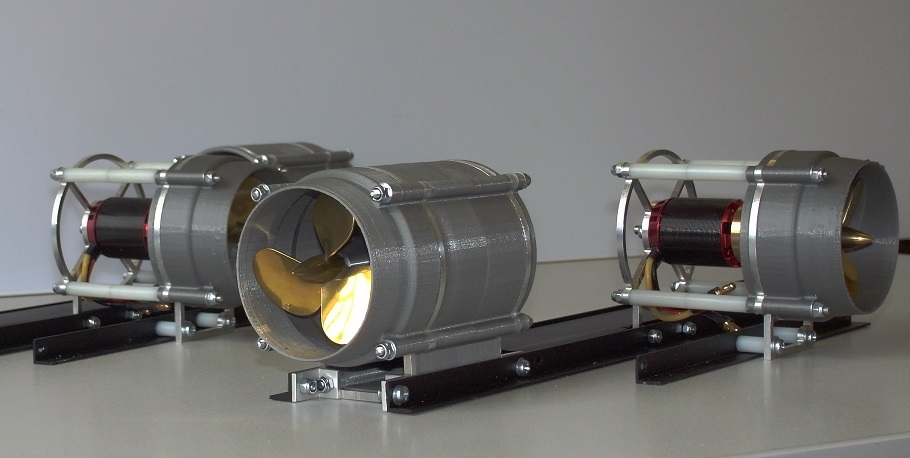
3 - Не, все эти "капсулы" - лишние проблемы с герметизацией и значительные затраты времени на их решение.
А главное, это только отложит решение проблемы, которую все равно придется решать. Проще сразу разобраться с перепрошивкой/реверсированием ESC.
Наверняка в хозяйстве есть запас старых. Здесь не требуются мощные, главное чтобы были одинаковые.
Мы вообще использовали регуляторы от древнего коптера XAircraft (один из первых серийных наборов)